
3D-печать CAD-дизайна
Слов Луиса:
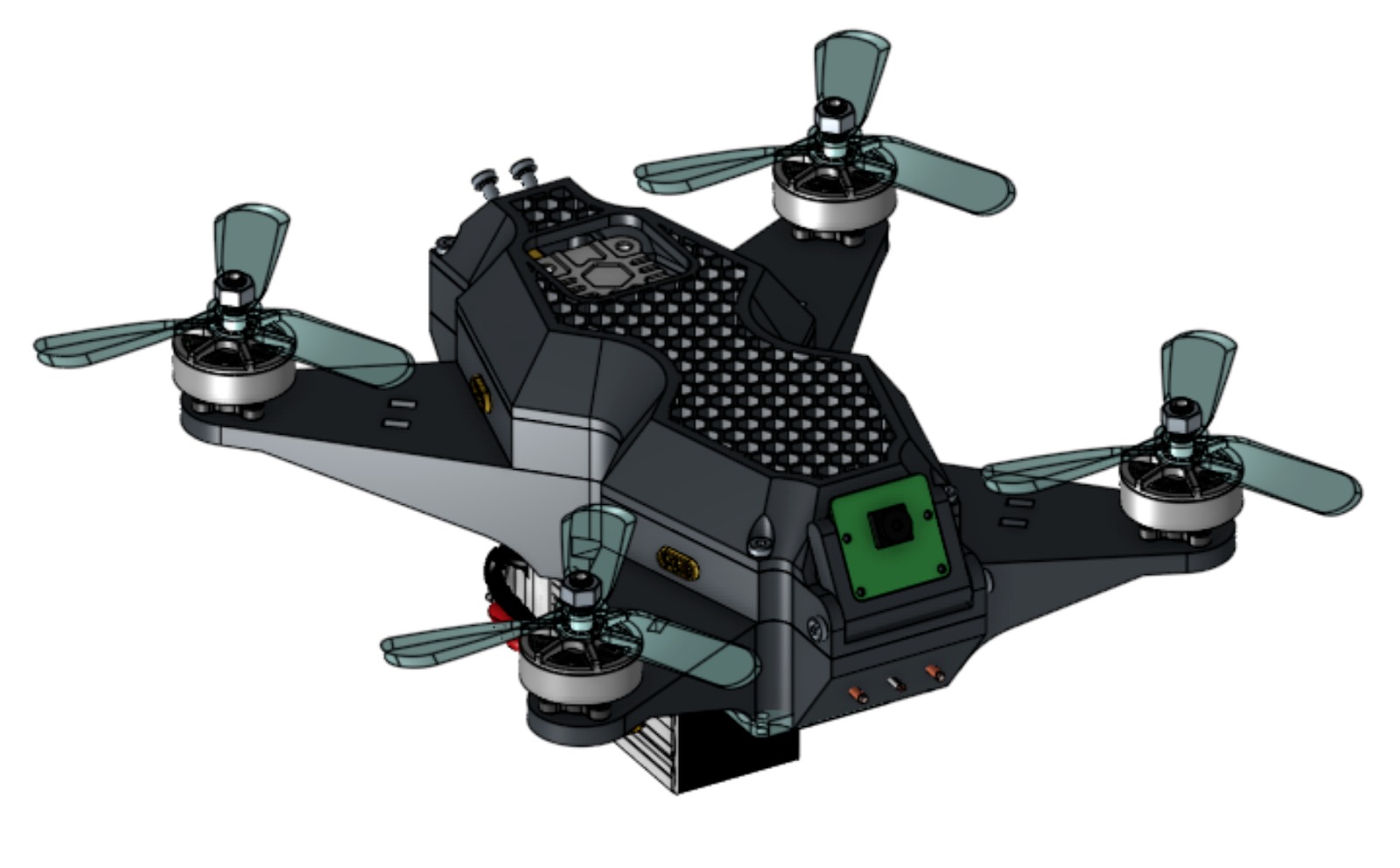
"Путешествие к созданию собственного дрона началось с проектирования в CAD-программе. Мой начальный дизайн был полностью напечатан на 3D-принтере с закрытой конструкцией и консольными кронштейнами для поддержки точечных сил. Крышка с ячеистой структурой обеспечивала охлаждение, а корпус позволял интегрировать соединения XT-60 и MR-30, создавая чистый и интегрированный вид. Внутри я убедился, что все электрические компоненты жестко закреплены, чтобы избежать нежелательных движений, которые могут дестабилизировать полет."


"Тестирование быстро показало, что напечатанные на 3D-принтере рамы были хрупкими и часто ломались во время аварий. Кроме того, ограничения рабочей зоны моего принтера означали, что размещение двигателя было тесным. Чтобы преодолеть эти проблемы, я изготовил новую раму из 4-миллиметрового углеродного волокна, увеличив колесную базу для лучшей стабильности. Используя программное обеспечение Carveco, я создал траектории инструментов и вырезал раму на станке с ЧПУ WorkBee в нашей лаборатории Maker Lab. Через два часа у меня была прочная, собранная рама, готовая для установки электроники."Не один, не два, а три Raspberry Pi
"Для мозга дрона я использовал Raspberry Pi Pico 2, подключенный к гироскопу MPU6050 для получения данных об ориентации в реальном времени и приемника протокола IBUS для упрощенных входов управления. Сначала я столкнулся с проблемами обработки сигналов из-за задержки обработки пяти отдельных ШИМ-сигналов. Переход на IBUS увеличил частоту цикла в десять раз, что значительно улучшило реакцию на полет. Pico выполнял PID (пропорционально-интегрально-дифференциальные) расчеты для обеспечения стабильности, а 4-в-1 ESC управлял сигналами двигателей. Дрон также имеет Raspberry Pi Zero с модулем камеры 2 и аналоговым VTX для полетов в режиме FPV (вид от первого лица) в реальном времени."
 Все вместе в лаборатории Maker Lab в Pi Towers
Все вместе в лаборатории Maker Lab в Pi Towers
"Программирование базировалось на коде контроллера полета Scout Тима Ханевича, который реализует режим «скорость», использующий значения PID для поддержания желаемых угловых скоростей. Точное настройка коэффициентов усиления PID была очень важна; неправильные настройки могли привести к нестабильности и опасным колебаниям. Я тщательно подходил к процессу настройки, начиная с низких значений для каждого параметра и постепенно увеличивая их.
Чтобы сделать процесс безопаснее, я сконструировал испытательный стенд для изоляции каждой оси и имитации условий полета. Это позволило мне достичь грубой настройки перед тем, как перейти к фактическим летным испытаниям, что в конечном итоге обеспечило безопасную и стабильную работу дрона."

")
")
")
Написать комментарий