
3D-друк CAD-дизайну
Зі слів Луїса:
"Подорож до створення власного дрона почалася з проектування в CAD-програмі. Мій початковий дизайн був повністю надрукований на 3D-принтері з закритою конструкцією та консольними кронштейнами для підтримки точкових сил. Кришка зі стільниковою структурою забезпечувала охолодження, а корпус дозволяв вбудовувати з'єднання XT-60 і MR-30, створюючи чистий та інтегрований вигляд. Всередині я переконався, що всі електричні компоненти жорстко закріплені, щоб уникнути небажаних рухів, які можуть дестабілізувати політ."


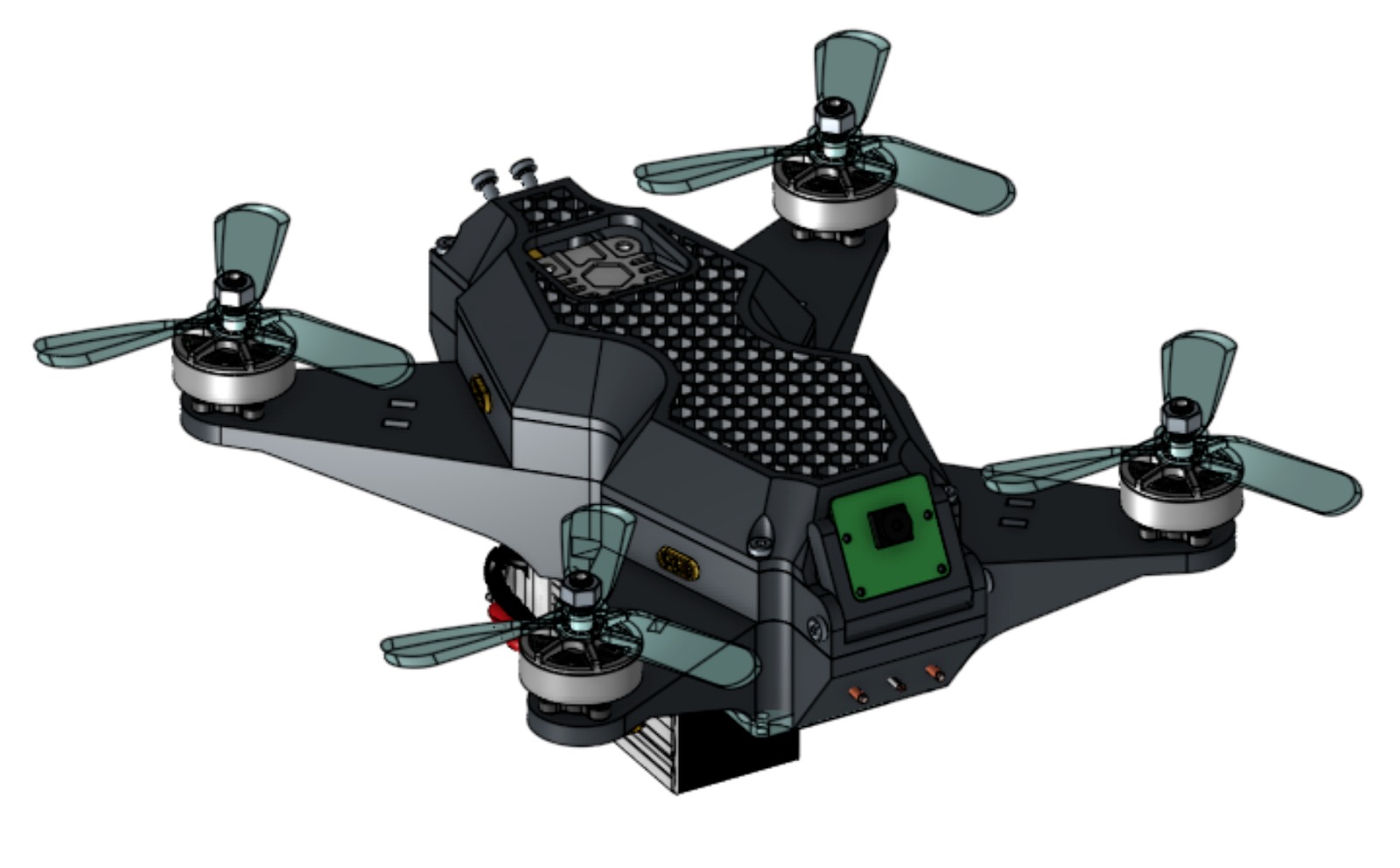
"Тестування швидко показало, що надруковані на 3D-принтері рами були крихкими і часто ламалися під час аварій. Крім того, обмеження робочої зони мого принтера означало, що розміщення двигуна було затісним. Щоб подолати ці проблеми, я виготовив нову раму з 4-міліметрового вуглецевого волокна, збільшивши колісну базу для кращої стійкості. Використовуючи програмне забезпечення Carveco, я створив траєкторії інструментів і вирізав раму на верстаті з ЧПК WorkBee в нашій лабораторії Maker Lab. Через дві години я мав міцну, зібрану раму, готову до встановлення електроніки."Не один, не два, а три Raspberry Pis
"Для мозку дрона я використав Raspberry Pi Pico 2, підключений до гіроскопа MPU6050 для отримання даних про орієнтацію в реальному часі та приймача протоколу IBUS для спрощених входів керування. Спочатку я зіткнувся з проблемами обробки сигналів через затримку обробки п'яти окремих ШІМ-сигналів. Перехід на IBUS прискорив частоту циклу в десять разів, що значно покращило реакцію на політ. Pico виконував PID (пропорційно-інтегрально-похідні) розрахунки для забезпечення стабільності, а 4-в-1 ESC керував сигналами двигунів. Дрон також має Raspberry Pi Zero з модулем камери 2 і аналоговим VTX для польотів у режимі FPV (вид від першої особи) в реальному часі."
 Все разом у лабораторії Maker Lab в Pi Towers
Все разом у лабораторії Maker Lab в Pi Towers
"Програмування базувалося на коді контролера польоту Scout Тіма Ханевича, що реалізує режим «швидкість», який використовує значення PID для підтримки бажаних кутових швидкостей. Точне налаштування коефіцієнтів підсилення PID було дуже важливим; неправильні налаштування могли призвести до нестабільності та небезпечних коливань. Я ретельно підходив до процесу налаштування, починаючи з низьких значень для кожного параметра і повільно збільшуючи їх.
Щоб зробити процес безпечнішим, я сконструював випробувальний стенд для ізоляції кожної осі та імітації умов польоту. Це дозволило мені досягти грубого налаштування перед тим, як перейти до фактичних льотних випробувань, що в кінцевому підсумку забезпечило безпечну і стабільну роботу дрона."

")
")
")
Написати коментар